 合同会社コンサランス
「DX/IoTビジネスモデル構築」
合同会社コンサランス
「DX/IoTビジネスモデル構築」
これまで、①SDVが求められる背景 ②ソフトウェアの特性 ③ソフトウェア・ファーストとの違い を整理してきた。
1. はじめに:SDVはアーキテクチャからしか成立しない
ここで重要なのは、SDVは思想や戦略だけでは成立しないという点である。SDVは構造(アーキテクチャ)そのものの変革であり、この理解が無ければ実現は不可能である。本章では、自動車アーキテクチャがどのように変化し、なぜその変化が不可避なのかを整理する。
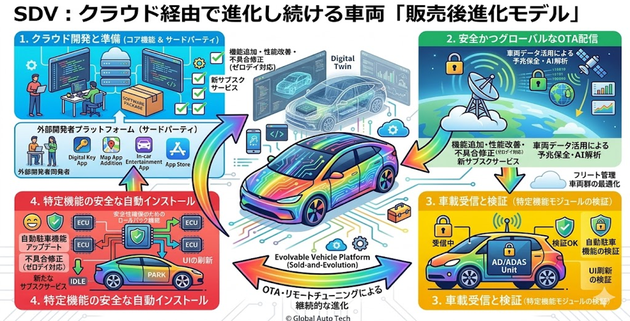
2. 販売後進化モデル:自動車の定義が変わる
まず最も本質的な変化は、自動車の定義そのものの変化である。
従来の自動車は、「完成品として出荷されるプロダクト」であった。一方、SDVでは、「販売後も進化し続けるプラットフォーム」へと変わる。
この変化を支えているのが以下のサイクルである。
・クラウド側でソフトウェア開発・改善
・OTAで車両へ配信
・車両で検証・適用
・実車データをクラウドへフィードバック
このループにより、機能追加・性能改善・不具合修正が継続的に行われる。重要なのは、このモデルでは開発が出荷後も終わらないという点である。つまり、自動車は「製品」から「サービス」へと変化している。
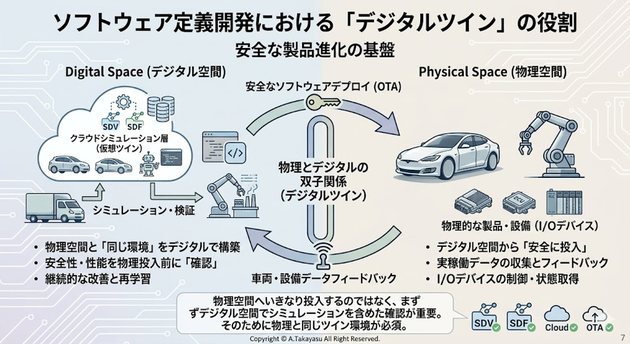
3. デジタルツイン:物理とデジタルの統合
この継続進化を支える基盤が「デジタルツイン」である。
デジタルツインとは、物理的な車両と同一の状態をデジタル空間上に再現する仕組みである。これにより、以下が可能になる。
・実機投入前のシミュレーション検証
・OTAアップデートの事前確認
・安全性・性能の仮想評価
・継続的な学習と改善
従来は、物理試験による検証が中心であり、時間・コストが制約となっていた。しかし、デジタルツインにより、「まず仮想で検証し、問題なければ実機へ適用」というプロセスへと変わる。
これは単なる効率化ではなく、開発プロセスそのものの再定義である。
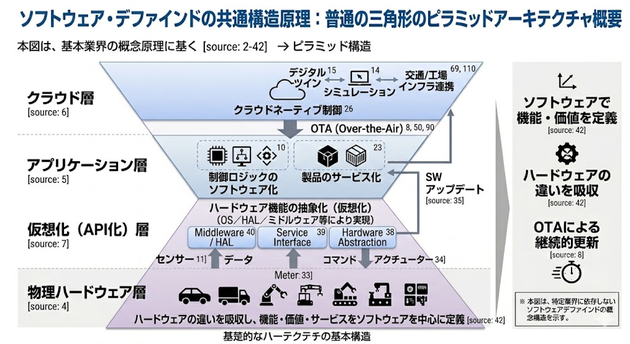
4. SDVアーキテクチャ:4層構造への進化
SDVの構造は、一般的に以下の4層で整理できる。
①物理ハードウェア層
・センサー ・アクチュエータ ・ECU
②仮想化(API化)層
・HAL(Hardware Abstraction Layer) ・ミドルウェア ・サービスインターフェース
③アプリケーション層
・制御ロジック ・車両機能 ・サービス機能
④クラウド層
・OTA配信 ・データ解析 ・シミュレーション
この構造の本質は、ハードウェアとソフトウェアの分離(疎結合化)である。従来はハードとソフトが密結合していたため、ECUごとに専用ソフト・機能追加=ハード変更となっていた。SDVでは、抽象化により、ハードの違いを吸収しソフトで機能を定義することが可能となる。
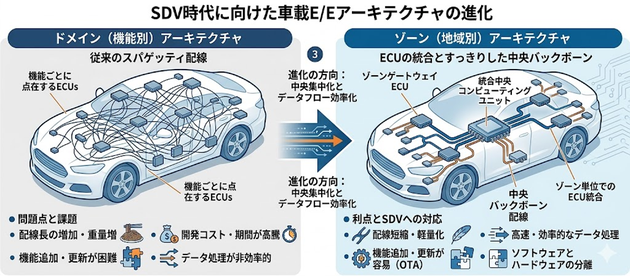
5. ECU構造の変化:分散から集中へ
自動車アーキテクチャのもう一つの大きな変化が、ECU構造である。
■ 従来
・機能ごとにECUが分散 ・スパゲッティ配線 ・機能追加が困難
■ 現在(過渡期)
・ドメイン単位で統合 ・制御領域ごとに集約
■ SDV
・中央集中型(Central Computer) ・ゾーンアーキテクチャ ・高速バックボーン通信
この変化により、配線の簡素化・データ処理の効率化・OTA更新の容易化が実現される。特に重要なのは、「機能単位」から「サービス単位」への変化である。
6. API化と再配置:機能の流動化
SDVでは、機能はハードウェアに固定されない。
API化により、ソフトウェアはどのECUでも動作可能となり、処理の再配置が可能となる。例えば、ECU統合後でも同一機能を維持したり、処理負荷に応じて分散配置したりといった柔軟な構成が実現できる。
これは従来の組込みシステムでは不可能であった。
7. OTA前提設計:更新が前提の構造
SDVでは、OTAは「追加機能」ではなく「前提条件」である。
ロールバック機能・段階的配信・セキュリティ保証などを含めた設計が必要になる。
つまり、「更新できるように設計するのではなく、更新を前提に設計する」という考え方に変わる。この設計思想の転換が、SDV実現の核心である。
8. クラウドネイティブ制御:制御の概念変化
従来の制御は車両内で完結していた。しかしSDVでは、クラウド側で制御ロジック改善・データ解析による最適化・フィードバックによる進化が行われる。
これにより、「制御は車両の中にあるもの」から「クラウドと車両で構成されるもの」へと変化する。この変化は、従来の車載ソフトウェア開発の前提を根底から覆すものである。
9. サードパーティ連携:エコシステム化
SDVでは、外部開発者との連携も重要になる。API公開・アプリ開発・サービス拡張などが行われる。
これはスマートフォンと同じ構造であり、車両がプラットフォーム化することを意味する。サードパーティの参入により、車両の価値はメーカー単独では創出できない規模に拡張される。
次回は
についてお話します。
コンサランス
IoT書籍発売中
↑2021年10月発売

↑2022年4月発売


お気軽にご相談ください
住所:(横浜事業所)
〒231-0021
横浜市中区日本大通7
日本大通7ビル4F YBP
代表:高安篤史
(Atsushi Takayasu)
(プロフィール)
主な業務 :
・経営戦略/ソフトウェアの
・IT系研修などの講師派遣
email;takayasu【@】consulance.jp
( 【@】⇒ @ )
休業日:年中無休
対象地域 :
首都圏近郊(東京都、神奈川県、千葉県、埼玉県、静岡県)を中心に全国へ出張等可能ですので、ご相談ください。名古屋、大阪、岡山、福岡などにも頻繁に出張させていただいております(その他、北海道、岩手、宮城、山形、群馬、栃木、山梨、岐阜、三重、福井、滋賀、京都、兵庫、広島、香川、福岡、長崎、大分、鹿児島にも複数回の出張の実績があります)。出張履歴
コンサルティング、研修提供、講師派遣をご希望の方は、下記の
メールアドレスへご連絡ください。
email;takayasu【@】consulance.jp
( 【@】⇒ @ )
直接詳細のお打ち合わせの御希望の方も、メールでご連絡ください。
DX
CiNii論文 弊社代表の関係論文